Enneigement des Deux Alpes en octobre 2017
Le 13 octobre on apprenait que le glacier des 2 Alpes n’ouvrira exceptionnellement pas à la Toussaint. Une décision prise […]
Le 13 octobre on apprenait que le glacier des 2 Alpes n’ouvrira exceptionnellement pas à la Toussaint. Une décision prise […]
You must have seen, in the press or social networks, images like these ones, showing yellow skies ( Loup de […]
Post préparé par Marine Bouchet pour le blog Kalideos Alpes (version originale) Les séries temporelles d’images optiques des satellites Sentinel-2 […]
Update : MUSCATE is back on track for the real time production, thanks to PEPS return to nominal production, and […]
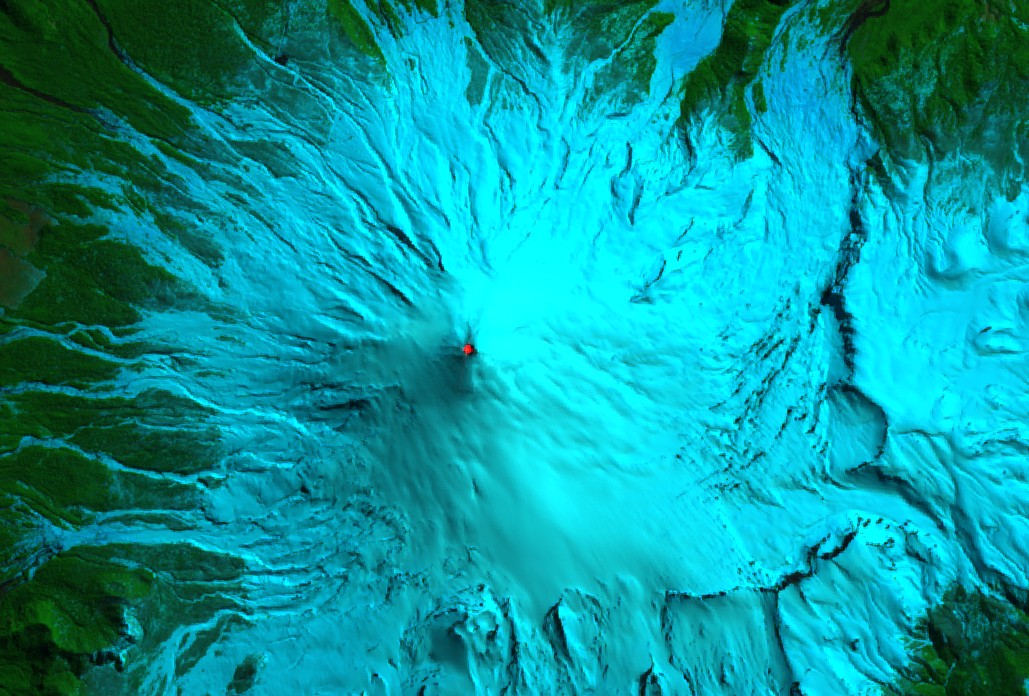
Villarrica volcano is one of the most active volcanoes in the Chilean Andes. A colleague of mine (Esteban Alonso) told […]
=> Translated from Theia website.The Theia forges just released a new product based on Sentinel-1 and 2 data. Le « High […]
=>Article rédigé à partir des articles du site Theia.Les forges de Theia viennent de mettre à disposition un nouveau produit […]
Our MUSCATE ground segment just passed a new milestone, with 40 000 L2A products processed with MAJA ! Last week […]
I just came back from Valencia, where I attended the fifth edition of the Recent Advances in Quantitative Remote Sensing […]
Following Simon’s publication on Saint Barthelemy island after Hurricane Irma, one of our twitter friends, @Pierre_Markuse, posted a comparison of […]